کیوسک خبر: محققان اولین الگوریتم غیرمتمرکز با ضمانت ضد ترافیک و تصادف را برای خودروهای خودران ابداع و آن را با موفقیت بر روی ۱۰۰ ربات آزمایش کردند.
به گزارش پایگاه اینترنتی «ساینس دیلی»، برای اینکه خودروهای خودران به یک واقعیت روزمره در دنیای ما تبدیل شوند، باید به طور امن و بینقص و بدون ایجاد خطر تصادف و راهبندان در کنار یکدیگر حرکت کنند.
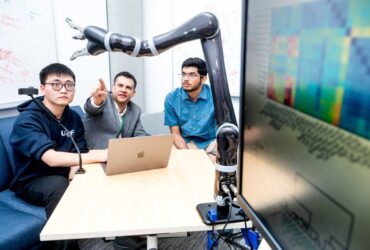
محققان دانشگاه آمریکایی نورت وسترن برای محقق کردن این امر اولین الگوریتم غیرمتمرکز را با ضمانت پرهیز از تصادف و راهبندان ابداع کردند. پژوهشگران سپس این الگوریتم را بر روی ۱.۰۲۴ ربات شبیهسازی شده و ۱۰۰ ربات واقعی در آزمایشگاه آزمایش کردند و این رباتها در یک کمتر از یک دقیقه به طور مطمئن و کارآمد شکلی از پیش تعیین شده به خود گرفتند.
مایکل روبنشتاین از دانشگاه نورث وسترن که هدایت این تحقیقات را برعهده داشت، در این باره میگوید: «با درک چگونگی کنترل فرمی که این رباتها در کنار هم قرار گیرند، میتوانیم چگونگی کنترل تعامل ناوگان خودروهای خودران را درک کنیم.»
برای جلوگیری از تصادف رباتها و یا ایجاد ترافیک و راهبندان، این الگوریتم زمین زیر رباتها را یک شبکه در نظر میگیرد. هر ربات با استفاده از یک فناوری مشابه جی. پی. اس، از محل قرار گرفتن خود در این شبکه آگاه میشود و قبل از تصمیمگیری برای حرکت از حسگرهایی برای ارتباط با رباتهای اطراف خود استفاده میکند تا خالی یا پر بودن فضاهای اطراف خود در این شبکه را مشخص کند.
مزیت این الگوریتم در غیرمتمرکز بودن آن است زیرا در یک سیستم متمرکز اگر یک ربات از کار بیفتد، تمام سیستم از کار میافتد. اما در یک سیستم غیرمتمرکز، هیچ رهبری وجود ندارد که وظایف رباتهای دیگر را به آنها دیکته کند. هر ربات تصمیمات خود را میگیرد. اگر یک ربات در این سیستم از کار بیفتد، باقی رباتها همچنان میتوانند کار را به اتمام برسانند.
گزارش کاملی از این پژوهش در مجله IEEE Transactions on Robotics منتشر خواهد شد.